
Why Automotive Architectures Are Evolving
Automotive systems are undergoing a profound transformation.
Modern vehicles are no longer defined primarily by mechanical components. Software, connectivity, advanced sensing, and high-performance computing are becoming central elements of vehicle design.
As vehicles evolve into increasingly software-defined platforms, traditional distributed architectures based on dozens — and sometimes hundreds — of Electronic Control Units (ECUs) are beginning to show their limitations.
This transformation is accelerating the adoption of centralized and zonal architectures designed to simplify integration, improve scalability, and support the growing complexity of automotive software.
The objective is no longer limited to improving performance alone. Automotive manufacturers now need architectures capable of supporting continuous software evolution, advanced driver assistance systems, real-time processing, cybersecurity mechanisms, and long-term maintainability across the vehicle lifecycle.
At the same time, this shift introduces entirely new engineering challenges related to integration, workload management, system isolation, and reliability.
The Limits of Traditional Distributed ECU Architectures
For many years, automotive systems were designed around highly distributed ECU-based models where each vehicle function relied on dedicated hardware.
This approach worked effectively when vehicle functionalities were relatively isolated and software complexity remained manageable. However, modern vehicles now integrate advanced workloads that require constant communication and coordination between multiple systems.
As complexity increases, distributed architectures generate excessive wiring, duplicated hardware resources, fragmented software integration, and growing maintenance challenges. The result is a vehicle platform that becomes progressively harder to scale, update, and validate over time.
The introduction of advanced functionalities such as ADAS, AI-assisted processing, over-the-air updates, and centralized cybersecurity monitoring has further exposed the limitations of traditional approaches.
In many cases, legacy architectures were simply not designed to support the computational and integration demands of software-defined vehicles.
What Is a Centralized Automotive Architecture?
A centralized automotive architecture consolidates multiple vehicle functions into a smaller number of high-performance computing platforms.
Instead of distributing intelligence across many independent ECUs, processing capabilities are concentrated into centralized controllers capable of managing multiple workloads simultaneously.
This approach simplifies software deployment and resource management while enabling more efficient communication between systems. It also creates a more scalable foundation for software-defined vehicles, where software continuously evolves throughout the vehicle lifecycle.
Centralized architectures are particularly valuable for supporting advanced functionalities that require significant computational density, including autonomous driving features, AI-based processing, high-performance infotainment systems, and real-time data analysis.
By reducing hardware fragmentation, centralized systems can also improve maintainability and reduce long-term integration complexity.
What Is a Zonal Architecture?
Zonal architecture extends this evolution further by reorganizing the vehicle according to physical zones rather than purely functional domains.
In this model, zonal controllers manage sensors, actuators, and local devices within specific areas of the vehicle, while centralized computing platforms handle higher-level processing tasks.
This architectural model significantly reduces wiring complexity because devices communicate with nearby zonal controllers rather than directly with distant ECUs distributed across the vehicle.
As automotive systems continue to grow in complexity, reducing cable length and communication overhead becomes increasingly important not only for efficiency, but also for manufacturing optimization, vehicle weight reduction, and energy management.
Zonal architectures also enable a cleaner separation between local device management and centralized software execution, creating a more scalable platform for future vehicle evolution.
Centralized vs Zonal Architecture: The Real Difference
Although centralized and zonal architectures are often discussed together, they solve different problems within the vehicle architecture.
Centralized architectures primarily address computational consolidation and software management. Their focus is on reducing hardware fragmentation while enabling scalable processing capabilities.
Zonal architectures, on the other hand, focus more heavily on the physical organization of the vehicle and the optimization of communication and wiring infrastructure.
In practice, modern automotive platforms increasingly combine both approaches.
Many next-generation vehicle architectures rely on centralized computing platforms for high-level processing while using zonal controllers to manage local interactions throughout the vehicle.
This hybrid approach allows manufacturers to balance scalability, efficiency, performance, and maintainability more effectively than with traditional ECU-based systems.
The Benefits of Centralized and Zonal Architectures
The transition toward centralized and zonal architectures introduces significant advantages for modern automotive platforms.
One of the most immediate benefits is the reduction of hardware complexity. Fewer ECUs mean lower duplication of resources, simplified integration processes, and more efficient maintenance activities.
Zonal architectures also reduce wiring requirements substantially. This directly impacts vehicle weight, manufacturing complexity, and energy efficiency.
From a software perspective, centralized platforms make software lifecycle management considerably more scalable. As software-defined vehicles become more common, manufacturers increasingly need architectures capable of supporting continuous updates, modular deployment strategies, and evolving software functionalities over time.
These architectures also provide a far stronger foundation for advanced automotive workloads that require low-latency communication and high-performance computing capabilities.
The New Challenges Introduced by Centralization and Zonal Architectures
While centralized and zonal architectures solve many limitations of traditional distributed systems, they also introduce new engineering challenges that cannot be underestimated.
One of the most important concerns involves mixed-criticality integration. Modern automotive platforms increasingly execute workloads with very different safety, security, and timing requirements on the same hardware infrastructure.
For example, infotainment systems, ADAS functionalities, cybersecurity monitoring, and real-time control applications may all coexist within shared computing environments.
Managing this level of integration requires robust isolation mechanisms capable of guaranteeing deterministic behavior and preventing interference between workloads.
Cybersecurity also becomes significantly more critical as centralization increases overall system interconnectivity. Larger attack surfaces and tighter software integration require security to be treated as a foundational architectural property rather than as an isolated feature added later in development.
Reliability and fault management become equally important. Consolidating multiple functions into fewer computing platforms means failures may potentially affect larger portions of the vehicle. As a result, redundancy strategies, tamper-proof runtime monitoring, fail-operational mechanisms, and advanced safety and security controls become increasingly necessary.
Why Hypervisors Are Becoming Critical
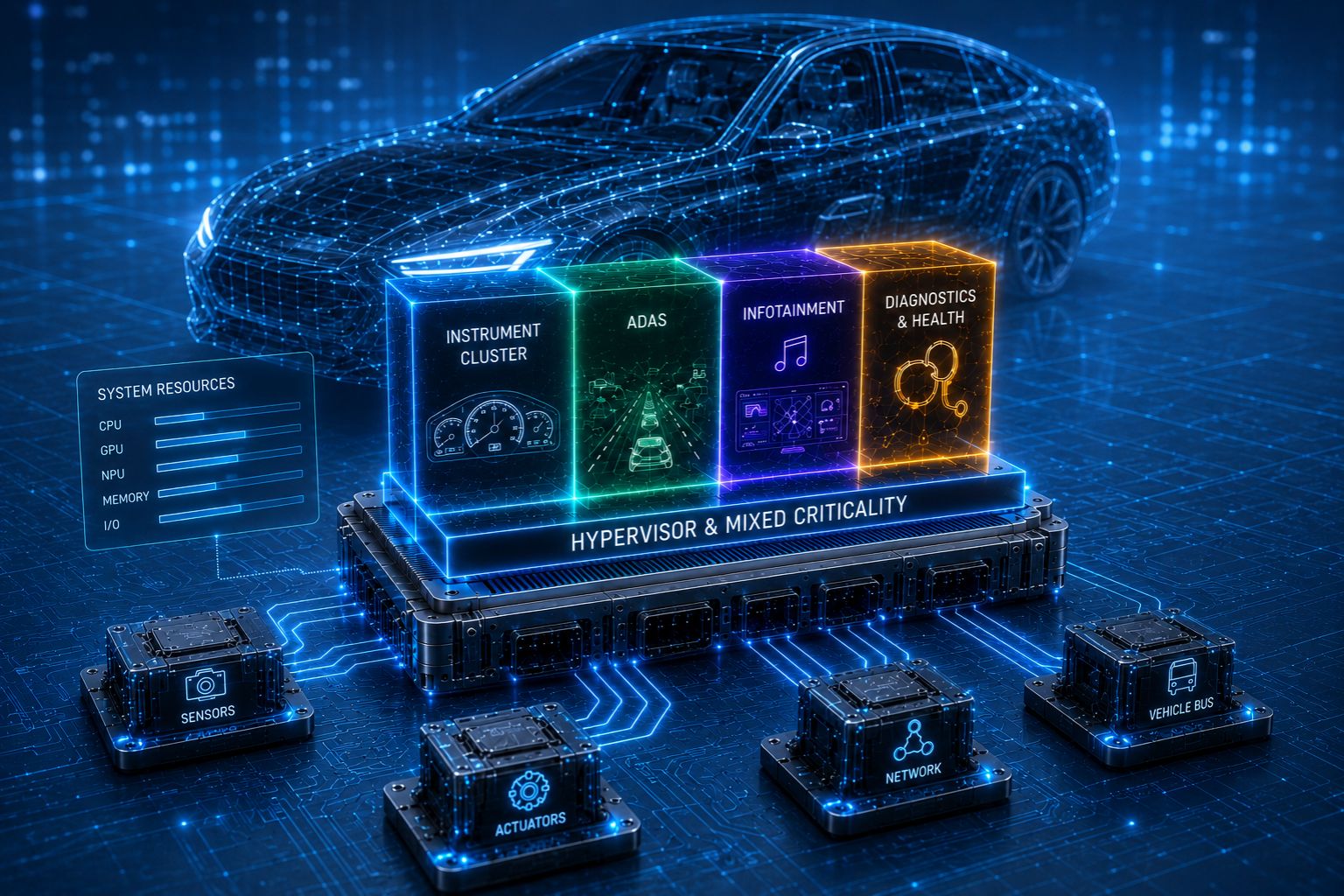
One of the technologies enabling this architectural transition is the hypervisor.
Hypervisors allow multiple isolated workloads to run securely on shared hardware platforms while maintaining strong separation between systems with different criticality levels.
In automotive environments, this makes it possible to consolidate Linux-/Android-based environments, real-time systems, safety-related functions, and cybersecurity services within the same computing infrastructure while preserving isolation and predictability.
As centralized architectures continue to evolve, hypervisor technologies are becoming increasingly important for balancing performance, scalability, safety, and security requirements simultaneously.
The Technical Divide: Not All Isolation is Created Equal
The industry is increasingly recognizing that hypervisor quality is not a binary attribute.
For mixed-criticality systems, the effectiveness of a solution depends on the depth and granularity of its isolation mechanisms across the entire hardware platform.
To properly support consolidated automotive workloads, a hypervisor must provide:
Spatial Isolation:
Ensuring that one guest cannot access or corrupt the memory space or devices assigned to another through strong VM separation, hardware-assisted memory protection, and advanced DRAM partitioning mechanisms, including bank-aware allocation strategies.
Temporal Isolation:
Hard real-time capability requires more than CPU scheduling alone. A robust hypervisor must provide fixed-priority and time-reservation scheduling for vCPUs while also controlling interference on shared micro-architectural resources such as caches, memory controllers, and system interconnects. Without control of these shared resources, deterministic execution cannot be guaranteed.
Resource Partitioning:
Advanced virtualization solutions increasingly need to integrate cache partitioning, memory bandwidth reservation, device affinity control, and topology-aware allocation to improve predictability and reduce cross-domain interference. Effective resource partitioning, however, requires precise knowledge of the target hardware architecture and SoC behavior, demanding platform-aware, low-level configuration of the hypervisor to decouple hardware-specific capabilities from the application layer, which should remain as hardware-agnostic as possible.
Efficiency:
All such non-functional mechanisms implemented by the hypervisor should minimize their impact on system functionality and real-time performance. Key requirements for a hypervisor include a low memory footprint, minimal run-time overhead, and extremely reduced and bounded latency and jitter in the management of both system-level and application-level events.
Safety and Security Requirements
Beyond technical performance, automotive-grade virtualization platforms are defined by compliance with rigorous safety and cybersecurity standards.
Functional Safety (ISO 26262):
For high-criticality applications such as autonomous driving, braking, steering, or powertrain control, a hypervisor must support certification targets up to ASIL-D. This typically requires a static and analyzable architecture, deterministic behavior, strong partitioning guarantees, and compliance with safety-oriented development practices such as MISRA for C/C++ programming languages as well as safer programming language (e.g., RUST).
Cybersecurity (ISO 21434):
As modern vehicles consolidate multiple workloads onto centralized computing platforms, the hypervisor becomes a critical security enforcement layer. The virtualization architecture must therefore mitigate Denial-of-Service (DoS) conditions, reduce side-channel exposure, and enforce strict isolation between safety-critical, connected, and third-party domains executing on the same SoC.
The Shift Toward Software-Defined Vehicles
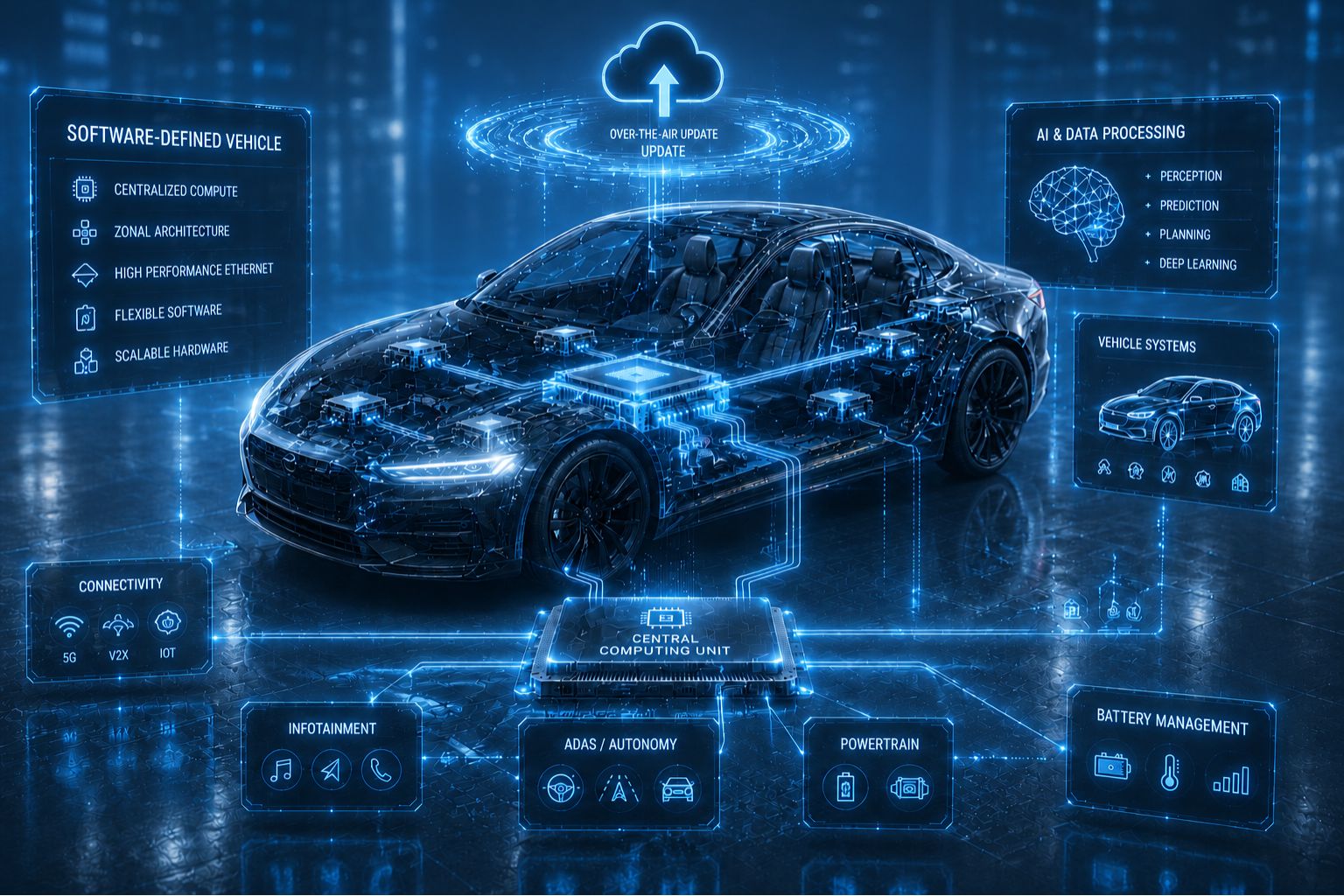
The evolution toward centralized and zonal architectures is closely connected to the rise of software-defined vehicles.
Future vehicles will increasingly depend on continuous software evolution, cloud connectivity, AI-driven functionalities, and centralized computing platforms capable of adapting over time.
This fundamentally changes the role of vehicle architecture.
The challenge is no longer simply integrating electronic components efficiently. It is designing scalable computing platforms capable of supporting years of software evolution while maintaining safety, security, and performance.
Architectural decisions are therefore becoming strategic choices that directly influence the long-term competitiveness of automotive platforms.
Final Thoughts
The transition from distributed ECU architectures to centralized and zonal systems is reshaping automotive engineering at every level.
These new architectures enable greater scalability, reduced hardware complexity, improved software management, and stronger support for next-generation automotive functionalities.
At the same time, they introduce new challenges related to mixed-criticality integration, cybersecurity, runtime reliability, and system isolation.
As vehicles continue evolving into software-defined platforms, architecture itself becomes one of the most critical enablers of innovation.
And most importantly:
The future of automotive systems will depend not only on software capabilities, but on the robustness and scalability of the underlying architecture supporting them.